![]()
02 March 2010
Two “micro-leak” defects leave some 25-35% of the Argo floats deployed between 11/2005 and 7/2009 vulnerable to errors in reported pressure and possible eventual failure of the transducer. The two micro-leak mechanisms (discussed below) present a common initial pressure-error trend but a different terminal characteristic. The physics governing the pressure error is common to both micro-leak mechanisms and is understood. This offers a highly defensible correction for errors with magnitudes up to 10 dbars or greater. For both micro-leak mechanisms the reported ocean pressure is low of correct.
The pressure error is essentially pure offset for error magnitudes in the range of 0 to -5 dbars. As the error approaches -10 dbars a linear slope component begins to develop causing errors at high pressure to be increasingly negative. At high errors the slope term contributes 20% of the error (e.g. -55 dbar error at atmospheric and -65 dbar at 2000 dbars).
Pressure errors from the micro-leak mechanisms are easily identified in Argo floats that report atmospheric pressure as a drift toward lower reported pressure that eventually exceeds the +/-1.3 dbar envelop of drift characteristic of healthy Druck sensors. Dana Swift (University of Washington) has developed an algorithm to identify “micro-leakers” based on atmospheric pressure readings.
However, where the atmospheric pressure measurement from the CTD is altered or not reported by the float controller (e.g. Teledyne Webb Research APF-8) the task of identifying transducers with micro-leaks is more difficult, and the quality of corrections less certain. It is especially in these cases where Sea-Bird needs the help of the QA/QC community to determine a best approach toward error identification and correction.
In these cases we imagine that the final identification scheme might consist of a combination of:
If a satisfactory scheme cannot be derived, then recovery of pressure data from this cohort of floats may not be possible, nor will acceptable identification of the micro-leak problem be possible for warranty relief purposes.
Sea-Bird Electronics (SBE) requests help from the Argo Data Management Group to develop and apply a systematic approach to identify all deployed Argo floats that have the Druck micro-leak problem. The method of identifying the micro-leak signature in atmospheric pressure data as implemented by Dana Swift may be sufficient, but the case where atmospheric data are not available requires that a robust algorithm based on (deep?) profile data and ancillary information be developed and perhaps tailored for each float type. This will facilitate two important tasks:
Sea-Bird stands ready to aid in this process but does not have the access to data nor the resources to apply the screening algorithms to the global array of floats, and we need the community’s help.
Norge Larson
President, Sea-Bird Electronics
+1 425 643 9866 office
+1 206 718-0003 cell
norge@seabird.com
Construction of the Druck pressure sensor
The Druck pressure sensor contains a oil-filled, sealed, chamber that holds the silicon pressure sensing element. It is electrically connected through high pressure glass-to-metal seals (GMS) at the back end of the chamber. A flexible titanium diaphragm is welded to the front of the chamber to transfer ocean pressure to the sealed oil volume. In addition a thick walled pressure fitting is welded to the front of the chamber servings as the pressure connection for the sensor. And a small circuit and sensor leads are soldered to the GMS electrical pins and potted at the back end of the sensor.
The process of vacuum back-filling and sealing the oil chamber typically leaves the chamber slightly over-filled with oil and the titanium diaphragm bowed slightly outward. As a result, the restoring force of the diaphragm overpressures the oil by 0-10 dbars, depending on overfill. In a normal sealed sensor this over-pressure (delta P across the diaphragm) is of no consequence and is removed by the calibration process. However in sensors with a micro-leak, the diaphragm relaxes as the oil leaks, and the reported pressure decreases with time (a negative pressure drift).
Two specific micro-leak mechanisms and consequences
Since the first notice, in March 2009, of the existence of a new class of pressure errors from Druck sensors, the cause of the errors has been traced to two different micro-leak pathways. Each pathway results in a slightly different negative pressure drift and terminal characteristic.
1) Fractured GMS seals
One leak pathway is through fractures in the glass of the GMS seals. The fractures are related to a change in the welding procedure that attaches the heavy pressure fitting. The welding change was introduced in mid 2005 in which the weld energy was increased (and consequent heat) by a factor of 2.5. The exact sequence (root cause) that creates the fractures is still being studied, but the connection to the welding change has been confirmed by direct experimentation by Druck engineers.
Oil leakage through the GMS fractures requires a high pressure across the seal. At 1000 dbars (typical float park depth) the leak rate is estimated to be 10 microliters per year +/- a factor of 2. As the oil leaks, the initial overfill and over-pressure of the “sealed” chamber decreases. Each time the float surfaces the atmospheric pressure reading is incrementally lower.
 |
| UW floats with well-behaved Druck sensors are shown in green. The heavy dashed black lines represent the envelope of surface pressure measurements taken from normally behaving Druck sensors. The red symbols and curves represent data collected from defective Druck pressure sensors on UW floats. The blue symbols and curves represent surface pressure data from BSH floats. |
When the diaphragm is within 5 to 10 dbars of its neutral (flat) position, its compliance ensures that any pressure difference is a relatively pure offset at all pressures. So, the initial drift exhibited by the Druck transducer with a micro-leak is a relatively pure offset at all pressures. This has been confirmed by recent recalibrations of Druck sensors with known microleaks as well as by direct experimentation on transducer modules.
However, this GMS fracture mechanism along with the high pressures at park depth allows for a continuing loss of oil, and negative pressure drift, with the diaphragm passing through the neutral position, bowing inward, and developing 10’s of dbars of negative pressure in the oil via its restoring force.
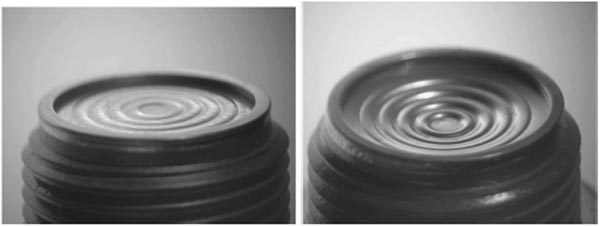 |
| Left: Normal appearance of the
corrugated diaphragm in a non-defective sensor. Right: Depressed appearance of the diaphragm in a sensor that has suffered "microleaks" of oil from inside the sensor. |
In this situation, when the floats reach the ocean surface, the negative restoring force of the diaphragm is insufficient to pull oil (and air) back through the GMS fractures. More surprising is that, because the oil is highly cleaned and degassed, a highly bowed diaphragm can pull a negative absolute pressure on the oil ( greater than -10 dbars). This has been verified by direct experimentation at Sea-Bird. It accounts for the negative drift magnitudes greater than -20 dbars reported by many Argo floats.
As the diaphragm bows significantly inward and exceeds its compliant range, a slope change adds to the pressure offset. At higher ocean pressures and colder temperatures the oil compresses and contracts resulting in a higher restoring force from the diaphragm at depth than near the surface .
One float with a -55 dbar offset at atmospheric pressure was recovered by University of Washington and recalibrations of the transducer at Sea-Bird found an offset and linear slope change that exactly verified the atmospheric offset and greater pressure error at depth expressed in the computed salinity error and TS shift.
 |
 |
 |
A final consequence of this GMS fracture mechanism is the inward bowing of the diaphragm to the point of contact and electrical shorting of the silicon pressure sensing element, and the railing of the transducer signal.

2) Pin-holes in the edge weld of the flexible titanium diaphragm
A second micro-leak pathway has also been discovered. This is a pin-hole leak in the weldment of the titanium diaphragm to the chamber body. This micro-leak pathway may have been present in the Druck design since 2003 and may account for the low occurrence rate (some 3% of transducers) that drift outside the +/- 1.3 dbar absolute envelope exhibited by healthy sensors.
The initial drift pattern exhibited by edge-weld pin-holes is the same as for GMS fractures, because the leak allows the initially over-filled chamber and outwardly bowed diaphragm to relax to its neutral state. The relaxation rate is relatively independent of applied pressure, because it is controlled by the pressure difference across the diaphragm which is only a function of diaphragm restoring force. The observed drift rate from this mechanism will depend on the size of the pin-hole, and, unlike the GMS fracture mechanism, would continue at full rate at atmospheric pressure.
We now believe this is what Dr. Elizabeth Steffan has observed as a drift in atmospheric pressure at the NOAA PMEL lab in undeployed floats. Her data indicate a negative drift rate of -0.5 to -1 dbar/year.
 |
|
|
One consequence of this microleak mechanism (because of the location of the leak pathway) is that the diaphragm will not relax significantly past the neutral position. So, the drift in reported pressure will asymptote to a fixed offset when the diaphragm has reached that position. The total magnitude of the drift that occurs up to this asymptotic condition depends on when the transducer was initially calibrated relative to the diaphragm relaxation, which begins as soon as the transducer is backfilled and sealed. In this condition, further profiling with a float would cause the transducer to possibly ingest some seawater through the pin-hole when at depth the diaphragm is depressed just beyond neutral and creates a slight negative restoring force that would drive liquid from the ocean side to the oil side of the pin-hole.
A final consequence is that ingestion of seawater may result in intermittent shorting behavior by the transducer if a significant amount of ocean water is ingested into the oil chamber.
Additional Information
![]()
Sea-Bird Home Phone: (+1) 425-643-9866 Fax: (+1) 425-643-9954 E-mail: seabird@seabird.com